戰鬥機器人







走向戰場
就目前世界人工智能(AI)技術發展來看,軍用機器人是發展的重點,各國都在努力開發具有高智商、高自主化的智能機械。
美國在軍用機器人研究領域的主導地位有目共睹。其成果的應用也範圍廣泛,從天上到地面再到水裏,可謂是無所不在。由于機器人士兵不會饑餓,不懂害怕,不會忘記命令,它們可能比人類士兵更加優秀,因此美國政府認爲10年內機器人士兵將成爲美軍的主力。美軍使用的機器人士兵起先是半自動化即受人遙控的,漸漸地,通過不斷完善,它們將能完全自動化,比人類士兵以更快的速度觀察、思考、反應和行動。
目前,美軍已研制出數種地面機器人,並把它們裝備部隊,投入前線戰場使用。

“魔爪”是爲適應美軍在阿富汗和 伊拉克的作戰需要而設計的,和其它機器人的不同之處在于,它無法自行活動,必須靠人通過無線或者光纖網絡遙控指揮才能完成移動、監視和射擊等所有動作。
“魔爪”重約36千克,裝備的電池可以保證其以8.4千米的時速持續行走約32千米。在待機狀態(監視)下,機器人的電池充一次電可以連續使用1周。
2005年3月,美國陸軍首次在伊拉克戰場上部署了18個遙控的“魔爪”系列SWORDS機器人士兵。SWORDS是“特種武器觀測偵察探測系統”的英文簡寫,因與“劍”的英文拼寫相同,我們就姑且稱它爲“劍”機器人吧。“劍”機器人攜帶有威力強大的自動武器,每分鍾能發射1000發子彈,它們是美國軍隊曆史上第一批參加與敵方面對面作戰的機器人。
“劍”身高0.9米,配備有M249型5.56毫米機槍,或者M240型7.62毫米機槍,外加M16系列突擊步槍與M202-A型火箭彈發射器,它能夠連續向敵方發射數百發槍彈及火箭彈。此外,每個“劍”還擁有4臺攝像機、夜視鏡、變焦設備等光學偵察或瞄准設備。鑒于“劍”的這種特殊裝備與能力,美國軍方對它寄以厚望,認爲它們能1個抵上幾個甚至十幾個人類士兵的作用。
“魔爪”機器人此前也曾屢立戰功,它曾經在波斯尼亞成功排除過手榴彈,也曾在世貿大樓的廢墟中救過人,還曾活躍在美軍掃雷部隊。

它們早已被部署在阿富汗的群山裏,每天都在公路旁或公路上探測“基地”與塔利班殘余分子隱藏起來的武器。這種機器人的手臂可以抓住並搬運物件,最善于探測牛或羊的屍體,那是反美武裝很喜歡隱藏炸藥的地方。它的前部安裝著2條短的前肢,使它能夠爬樓梯。這2條短肢具有防水功能,能夠跨越淺的河流與崎嶇山路。
還需努力
機器人士兵的功能此前一直限定在協助人類從事更多的危險軍事任務範圍內,如今這些半自動機器人將攜帶各種槍械、自動榴彈發射器及火箭筒和反坦克武器,以機器人射手獨有的高精度對抗敵方人員、火力點、裝甲目標等。在伊拉克戰爭結束近兩年之後,美國投放機器人士兵的主要目的就是爲了減少人員傷亡。
機器人投入戰場的另一項不確定因素是機器人辨別敵友的能力。“劍”機器人的制造商指出,目前這種機器人士兵還得靠800米外人類士兵的操縱控制。不少美國軍事專家也承認,等到機器人真正具有高度智能,能夠自主識別敵友、辨別平民與士兵,還將需要至少30年的時間。如果機器發生差錯或操縱者發生失誤,意味著平民與軍隊傷亡的成倍增加,誰來對此負責呢?每次技術革新總能爲人類帶來新的收獲,但同時又可能會以某種領域內的危機付出代價。核技術的發明,克隆技術的成功,概莫能外。機器人士兵的出現和投入實踐,同樣如此。
針對機器人士兵已經暴露出的和潛在的問題,美國陸軍目前正在開展幾項有針對性的研究,以便能夠更好地訓練機器人去執行戰鬥偵察巡邏任務。
爲了執行此項任務,機器人必須具備兩樣東西:傳感器和優異的程序。它們必須能夠迅速、安全地讀取情況,即便在它們正在翻越障礙或是在穿越往來的車流,它們都應做到這一點。執行偵察任務要比從A點移動到B點複雜得多,它們不僅需要尋找隱蔽點還要自行選取路線。
傳感器是創造機器人靈活行爲不可或缺的介質。目前陸軍實驗室最先是訓練機器人執行護衛和巡邏任務,而陸軍希望能夠融入更多的特殊戰術行爲。
機器人的具體動作由設計人員制定,在執行任務過程中,人員向機器人發布指令,然後由機器人根據具體情況進行處理並做出一系列決定。
例如,當機器人在執行一項偵察任務過程中接近一個交叉路口時,機器人必須明白它需要對哪些要素産生反應。機器人對靜止的事物,如牆和道路,做出反應比較簡單;相對較難的是如何避讓周圍的行人、觀察停止標記、掃描可疑事項並選定最優路線。爲了躲避對向交通,機器人系統需要能夠算定迎面駛來的車輛的進程和速度,並制定自身的前進路線,以避免相撞。
爲了使機器人能夠躲避障礙物,首先需要裝備一種綜合感知設備,它可對外部環境進行掃描,並控制車輛對障礙物做出反應;然後是能使機器人成功躲避障礙所需的動力,因爲當機器人遇到陡坡時,它必須有足夠的動力完成各種機動動作。
美軍的研究人員正在努力提高機器人的各種能力。因爲高智能機器人不應僅局限在城市或崎嶇地形等單一條件下使用,它應能適應各種惡劣的作戰環境,因此研究人員正試圖爲機器人制造出更有效、更堅固且更小巧的傳感器。軍方希望機器人能夠更爲有效地適應瞬息萬變的戰場形勢並發揮其應有的作用。例如,當路邊有一個新的盒子,可能是臨時爆炸裝置或其它什麽,機器人應能及時地發現。
光輝的前景
不難想象,在不久的將來,戰場上沖鋒陷陣的主角將會是各種各樣的機器人士兵。讓我們大膽地來設想一下未來戰場的一幅畫面:首先上陣的是無人機和無人地面偵察車輛,甚至體積更小的昆蟲式無人偵察器對對方的軍力部署、陣地分布等重要軍事目標進行偵察;隨後一方以機器人地面突擊力量結合無人戰鬥機/攻擊機對敵陣地實施飽和式打擊,摧毀各類抵抗力量,而後方則是由機器人組成的龐大的補給線,源源不斷地爲前線運送補給物資;同時,空降式機器人將秘密在敵後方著陸,對指揮通信設施、補給線,甚至指揮所實施打擊……最後,人類士兵只需完成最終意義上的占領——戰爭結束。周雨凝
http://jczs.news.sina.com.cn/p/2006-02-16/0824351193.html


美國未來戰鬥系統中的機器人系統
美國陸軍正在雄心勃勃投入數十億美元研制其“未來戰鬥系統”。這一系統包括有人地面車輛、無人機以及大、中、小型的各類無人地面車輛。2003年9月,聯合防務公司地面系統分部被“未來戰鬥系統”總承包商——波音公司和國際科學應用公司選中,承擔無人地面戰鬥車輛第一階段的工程研制,以設計和發展武裝機器人。此項工程也是“未來戰鬥系統”機器人研制的最大的工程。“未來戰鬥系統”的機器人包括兩大類:一類是偵察型機器人(簡稱ARV—RSTA,也可簡稱爲ARV—R),可用于執行諸如偵察、監視、目標獲取等任務。另一類則是攻擊型機器人(簡稱爲ARV—A),采用遙控方式,以其車載的直瞄或間瞄火力,直接爲乘車或下車作戰的部隊提供火力支援。研制合同還包括第二階段的項目內容,即與“未來戰鬥系統”整合以及進行技術演示等。第二階段研制將利用位于加利弗尼亞州桑塔克萊拉的工廠設施進行。
偵察型機器人,將使用6×6通用裝甲車底盤。該底盤由1臺四沖程六缸2l 7馬力的 柴油 發動機提供動力,並由蓄電池提供輔助動力。該車0~48千米加速時間爲10秒,最大速度90千米/小時,最大行程400千米。該車將安裝1個小型常規旋轉炮塔。戰鬥全重不超過8.5噸。該車將使用鈦合金和陶瓷裝甲。偵察機器人主要用于在有人戰鬥車輛(如偵察、監視戰鬥車輛)前方代替有人車輛遂行作戰任務。下車作戰人員亦可控制無人戰鬥車輛的行動。陸軍宣稱,在遙控條件下,偵察型機器人可在城市作戰和其他戰鬥環境下遂行偵察、撒布傳感器、指示打擊目標,以及使用特種彈藥對建築物的工事、地下通道以及其他城市設施實施打擊,或承擔無線電轉信以及裝備戰損評估等任務。該機器人將安裝1個高5米的伸縮桅杆,其頂端裝有電視、紅外、激光傳感器、多用途Ka波段雷達及核生化傳感器,通過炮塔頂部的發射裝置可布撒無人值守的地面傳感器。該車還將配備由通用動力公司研制的“高級乘員用”機關炮一一XM307 25毫米武器系統,並攜帶150—200發彈藥。
攻擊機器人的主要作戰任務包括在遙控條件下提供偵察,布撒傳感器、挂示打擊目標,以及使用特種彈藥對建築物的工事、地下通道以及其他城市設施實施打擊,標示和繞過建築物內、工事內以及地下通道內的危險物,評估裝備戰損情況,實施無線電通信,以直瞄火力或反坦克武器直接支援乘車或下車的步兵進行作戰行動,占領關鍵目標等。該車將安裝MK44型30毫米機關炮,以及1個四聯裝超視距通用導彈發射系統。
導彈發射裝置可降入炮塔內從而得到防護。聯合防務公司將于2010年提交原理樣車,用于預計在2012~2014年裝備的第一支旅級規模的“未來戰鬥系統”的配套裝備。一個典型的“未來戰鬥系統”旅,大體需要45輛此類無人戰鬥平臺。
2005年3月,美國聯合防務公司贏得了美國陸軍坦克自動化研究、發展和工程中心的一份價值3 090萬美元的無人戰鬥車輛的研發合同。該合同要求公司以作戰需求爲牽引,立足可能的技術發展,整合無人作戰平臺概念技術。無人作戰平臺演示車被視爲未來戰鬥系統無人作戰平臺系統的發展以及標志性成果的必要步驟。
洛克希德馬丁公司正在發展一種多功能的效用/保障和裝備保障無人地面車輛平臺(Mule,俗稱“機器騾”),戰鬥全重2.5噸,可用于直接支援步兵分隊的戰鬥行動。正在進行中的該項研制計劃,預計可能得到2億美元的追加撥款。正在研制中的“機器騾”有三種不同類型:運輸型“機器騾”,可運送裝備和物資等,直接支援2個下車戰鬥的步兵班的戰鬥行動,同時,它也可擔負後送傷員任務;攻擊型“機器騾”,將裝備小口徑武器以及四聯裝導彈,直接支援下車步兵的戰鬥行動;破障型“機器騾”,則主要用于探測和排除地雷,准確標示地雷場範圍等。
“機器騾”將采用先進的6 X 6輪式裝甲車底盤。該底盤的行走系統采用獨立懸挂系統和電驅動系締.該車討乖盲牆高1.5米,越壕寬1.5米,爬坡度21.8度,涉水深1.25米,車底距地高0.5米。
未來戰鬥系統中最小的“機器人”,爲人員可攜帶的小型無人地面作戰平臺,主要用于城市的各類地下通道、排水管道以及洞穴中,遂行偵察、監視和目標定位等任務。小型無人作戰平臺設計重量小于13.6千克,並可負載1個重量在2.72千克以內的、即插即用的(偵察、監視)模塊。美軍設想,此種便攜式小型無人作戰平臺應具有可連續工作6小時以上的能力,操作人員可有效遙控該平臺在距地面1 000米的高度、深入地道200米以內的距離上遂行各種任務。
爲加快研制步伐,去年初小型無人作戰平臺的研發費用已由3.73億美元增加到5.14億美元。在研的小型無人作戰平臺,較之已裝備美軍的,集探測、巡邏和排爆功能于一體的“帕克博特”(PACKBOT)系列小型無人作戰平臺更小、更輕便靈活,並有效克服了該機器人在 伊拉克和阿富汗戰場使用中暴露出來的問題。
首輛“守護者”全自動安全巡邏車,選用了已經裝備以國防軍和邊防警察部隊的4 X 4“雄貓”輕型全地形車的底盤。該底盤具有良好的越野性能,最大速度可達80千米/小時,最大行程達500千米,最大有效載荷達500千克(含防護敏感部位的裝甲板)。“守護者”全自動安全巡邏車可安裝各類傳感器,如電視、熱像儀、高靈敏度的麥克風、喇叭和無線電臺等;可配置各類輕型武器系統,如機槍、榴彈發射器,能使用各類致命或非致命彈藥。控制中心可以根據需要控制數輛“守護者”,並對入侵者做出相應的反應,直到快速反應部隊到達。
以色列飛機制造公司正在試圖尋求與美國的公司進行合資,將“守護者”機器人推向美國市場。以色列飛機制造公司堅信,美國將爲該型機器人提供一個前景十分廣闊的市場。
埃爾比特系統公司還研發了一種基于“湯恩卡”(Tomcar)底盤的“機器人”系統,並命名“阿維德”(Avidor,即“自主行走型沙漠和公路兩用車輛”英文的縮寫)一2004。該車參加了在2004年3月舉辦的的“塔巴”(Darpa)無人駕駛車輛“極限挑戰”拉力賽。在比賽中,“阿維德”一2004安裝了地面和基于地理信息系統技術的空中成像系統,該系統可與實時差分定位系統(DGPS)和慣性導航系統(INS)配合使用。該車的增強功能還包括能自動完成各種行駛操作動作,如換檔、轉向、加速和制動等的步進電機和伺服系統。此外,該車還裝有電視、激光雷達和超聲探測器等裝備,可及時獲取障礙物情況和識別道路。
英國的排爆機器人研制情況
基于對無人作戰平臺具有廣闊應用前景以及其地位和作用愈顯重要的認識,奎蒂克公司(QinetiQ)于2004年11月斥資1.63億美元,兼並了美國以排爆機器人研發見長的福斯特一米勒公司。目前,兩家公司正在福斯特一米勒公司的“鷹爪”系列無人作戰平臺基礎上合作研發用于武器觀測、偵察和目標捕獲的“劍”(Swords)式特種機器人系統。
履帶式“鷹爪”無人作戰平臺,最初設計用途爲排除複雜/簡易爆炸物,其重量不超過45千克,以便于人員攜行,其遙控距離達1000米,自第1輛“鷹爪”機器人裝備美軍並于2000年在波斯尼亞使用以來,該型機器人已在伊拉克和阿富汗遂行了20 000多次任務。
“鷹爪”的偵察型系列機器人,由于未安裝機械臂與武器,全重也不超過27千克,因此更加輕便靈活。該型機器人可安裝各類如晝/夜觀察傳感器以及監聽裝置等。“鷹爪”機器人可安裝M2407.26毫米機槍、M249 5.56毫米機槍或“巴雷特”12.7毫米狙擊步槍等輕武器系統。2003年~U2004年,已有4輛“鷹爪”無人作戰平臺原理樣車用于評估。2005年初,18輛該型無人作戰平臺海運至伊拉克。在2004年,1輛配置有探測化學、毒氣、溫度和輻射裝置的樣車,移交給陸軍武器裝備研究、發展和工程中心,用于試驗和評估。
目前,世界主要軍事強國都有研制新一代機器人的計劃和項目,隨著這些項目的實施,新一代機器人將陸續走上戰場,機器人戰爭時代已經不太遙遠。 彭彬 文章來源:《坦克裝甲車輛》雜志2006年第5期


據介紹,“MRK-27-BT”配備有一部履帶式底盤,裝備的武器包括兩具“大黃蜂”火焰噴射器、一挺機槍、兩具榴彈發射器和六具煙霧彈發射器。俄機器人技術應用設計局負責人伊利亞?拉維雷切夫表示,士兵們現在使用的武器無需接受特殊改裝,便可被直接安裝到“MRK-27-BT”戰鬥機器人上。此外,在必要的情況下,士兵們還可直接從“MRK-27-BT”上取下武器用于作戰。
研制人員指出,“MRK-27-BT”的機動性和穩定性都非常出色,其整體性能要優于國外的同類産品,如美國的SWORDS戰鬥機器人。在使用過程中,“MRK-27-BT”的操作也非常簡單--操作手可通過兩個遙控杆對指揮其行動,而且遙控的距離可達200-500米。除此之外,該型機器人上還配備有攝像機,能夠同時將所獲取的圖像傳送至兩臺監視器上,以方便瞄准開火。
目前,俄機器人技術應用設計局已制造出一部“MRK-27-BT”戰鬥機器人。據悉,俄國防部已對采購該型機器人表示出了濃厚的興趣。雖然俄軍方現在並未正式訂購該型機器人,但考慮到美國目前已開始大規模裝備類似的機器人且它們在未來戰場上可能發揮巨大的作用,俄軍方有望在不久後向生産廠家下達訂單。
就火力配置來說,俄羅斯的“MRK-27-BT”要略強于美軍于去年開始投入使用的戰鬥機器人。此前有報道稱,美國福斯特-米勒公司于2008年夏季向美國國防部交付了首部MAARS(意爲“模塊化先進武裝機器人系統”)。這種機器人裝備的主要武器包括一挺7.62毫米的M240B機槍和一部40毫米口徑的榴彈發射器。按照計劃,美軍將在2014年前裝備1700部戰鬥機器人。
http://mil.news.sina.com.cn/2009-10-30/0940571943.html

營的無人偵察機(UAV)。這種無人偵察機在100公裏以外的高空也可以准確地捕捉敵軍細小的動作。實際上,1999年軍級部隊已經部署使用了韓國自産無人偵察機“松鶻鷹”,而韓國國防部表示,明年開始開發比這架無人偵察機性能更優秀的中高度無人偵察機。
韓國總統與機器人扳手腕(圖)2005-11-30 09:15:43
韓國釜山展出愛因斯坦模樣的機器人(圖)2005-11-17 09:28:20
韓國在世界上率先制造出授課機器人教師(圖)2005-10-10 17:55:57
韓國研制成功世界第一款機器人型供彈裝甲車2005-10-04 15:11:59
投巨資爲彌補兵員空缺:韓將研制戰鬥機器人2005-09-25 13:19:09
韓國准備投巨資研制戰鬥機器人彌補兵員空缺2005-09-24 15:44:18
韓國將投巨資研制可遠程遙控的戰鬥機器人2005-09-24 13:32:00
韓國政府將投入3200萬美元巨資研制戰鬥機器人2005-09-24 11:41:27
朝韓邊界戒備森嚴 韓想用機器人鎮守三八線2005-06-20 11:26:09
韓國計劃2013年在全球機器人技術上名列三甲2005-06-20 10:09:32
韓國軍方考慮用配有槍支的機器人巡邏三八線2005-06-20 09:27:49
韓國軍隊即將在韓朝非軍事區布署戰鬥機器人2005-06-13 20:19:50
韓國防部計劃到2011年部署約250部戰鬥機器人2005-04-14 08:00:12
http://mil.news.sina.com.cn/2005-12-01/0936334704.html


 |

http://jczs.news.sina.com.cn/p/2006-10-07/0951402807.html

美國聯合部隊司令部(JFCOM)目前正在“阿爾法計劃”下探索機器人作戰的可行性。計劃初步設想到2005年,戰場上的自主機器人將是一種標准:到2025年,自主機器人將是一種網絡化和一體化的高度智能綜合體而不需要人的直接參與。與此同時,已經正式列入美國國防財政預算的陸軍“未來作戰系統”(FCS)也把非有生作戰力量作爲重要的組成部分。在這一規劃中。戰術機器人的作用得到了突出和強化。它們既包括無人機、遙控武裝偵察車等“機器人間諜”,也包括能夠運載後勤物資的“機器騾馬”,更有能夠執行戰鬥任務的“機器人士兵”。FCS的機器人概念還包括全天候自動傳感系統、目標定位系統等。
各國軍隊都在大力開發各種無人平臺,那麽我國這方面的情況又如何呢?帶著這個問題,本刊記者來到北京亦莊經濟技術開發區,采訪了北京馳意無人數字感知技術有限公司總經理、高級工程師楊宏斌。
從楊宏斌總經理的介紹中我們得知,根據産品特性和使用領域,目前我國將地面無人平臺中的硬件分爲無人車和機器人兩大類。在軍事、防務方面重點以無人車爲主體形式出現,在工業及特種功能高度集成方面重點以機器人爲主體。其中無人車又分遙控式、半自主式和全自主式三個大類。根據其在作戰中的用途,主要分爲指揮平臺、偵察平臺、突擊平臺、保障平臺、特種平臺,目前使用較多的領域有偵察戰場情報信息、核生化區域探測、無人戰鬥和特種多功能工程(如排雷、運輸、通信網絡中繼等)。
由于我國技術基礎薄弱、研究工作起步較晚,在某些重要的基礎學科,如特種傳感、視覺導航等理論與技術方面與國外某些國家存在著較大的差距。
目前全球無人智能車輛平臺的前三甲是美國洛克希德?馬丁公司。以色列埃爾比特公司、德國RoboWatch公司。洛馬公司長于平臺結構體的設計,埃爾比特公司長于控制系統的設計,德國公司則長于導航技術和人工智能技術。RoboWatch公司最負盛名的便是地面無人車系統的自主導航技術。近幾年有關無人平臺的防務展中,該公司都是被盛邀參加的對象。他們將人工智能、GPS+INS、運動學、激光測距、雷達探測、超聲探測、控制等技術進行綜合應用研究,在國際上首先實現了GPS信號不可用情況下的無人平臺自主導航。
中國兵器集團通過與其合作,在無人車輛的系統設計、産品集成、技術開發、基礎工藝平臺建設等方面都會獲得快速提高,並能帶動國內相關領域和産品的研發深度和研發速度,目前已經達到國際先進技術水平。
在我們對公司有了總體了解後,楊總帶我們來到生産車間。走訪一下馳意公司正在生産的“五兄弟”。楊總還順便告訴我們,雖然這“五兄弟”都已經有訂貨,馬上就將開始生産,但暫時還是外國用戶購買的,因此只有外國名字,也許《兵器知識》的熱心讀者們能夠爲它們起個朗朗上口的中文名。

MOSRO長0.36米,寬0.48米,高1.18米,重25千克,上面安裝有各種傳感器。它能自動感知探測周圍的牆壁、障礙物,從而在室內自由行走,最大行進速度4千米/小時,可爬13°的坡。電池充電時間爲4小時,連續工作時間14-16小時。MOSRO的紅外傳感器能自動探測和跟蹤12米內的人員,雷達傳感器的作用距離爲30米。發現可疑人員後,它還能自動轉身,將頭部的攝像機對准目標。
各種探測數據、視頻圖像能通過多種形式的通信網絡,傳輸給控制站,比如無線通信網卡。楊總在一臺普通的商用筆記本電腦上鍵入一個IP地址,就像把計算機聯入普通局域網那樣,啓動了一臺MOSRO。然後命令它分別用紅外、雷達跟蹤我們這幾個“外來者”,整個過程非常簡單。
MOSRO還可以選裝氣體/溫度傳感器、毒氣檢測裝置等。它能在15%到+40℃的環境下正常工作。這些功能對于軍隊後勤部門來說,還是非常有用的,不僅能減少後勤人員的工作量,還能在一些特殊場合裏完成一些危險性的檢查工作,比如彈藥庫、燃料庫。

前後伸出四個尖角的是模塊式排爆機器人(ASENDRO EOD)。它長約0.6米,寬高0.4米,兩側各有一個提手,包括電池時重45千克。這個方箱子裏主要是電池、驅動系統、通信設備、控制系統。ASENDRO機器人使用直流電動機驅動系統動作,最大行駛速度可達10千米/小時。電源系統使用24V/27A蓄電池。機器人混合操作時電源工作時間可達4小時。由于電池的模塊化設計,更換起來很方便,短短一分鍾就可以完成。
ASENDRO EOD的行走裝置,我們在伊拉克戰場上的美軍機器人裏經常見到,它的爬坡和越障性能優良,最大爬坡度可以達到40°,可越過0.15~0.2米高的障礙物,執行爬樓梯動作。它還使用了先進的控制算法,可以執行精確慢速動作,這在排爆作業中非常重要。
該機器人采用2 400兆赫通信頻率,同時具有433兆赫安全數據無線通信功能,可傳輸視頻和數據。其控制站、操作界面和MOSRO幾乎一樣,也非常簡潔、方便、實用。在野外無線電遙控時,有效半徑可達2千米。它還可選用200米長的光導電纜(光導電纜盤,可拉長至500米),用于複雜環境的探測與災難救援。
ASENDRO EOD的上方將安裝精密的操作臂,標准長度約1.6米,最長可伸長到2.2米。操作臂頂端是立體攝像機和平行爪,用來抓取未爆炸彈等危險物。平行爪開度約10厘米,操作臂的承載能力可達到5千克。
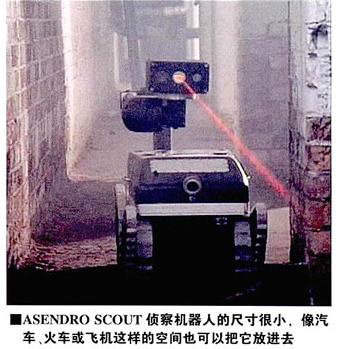
如果說ASENDRO EOD排爆機器人是一個文靜的大哥,那麽ASENDROSCOUT偵察機器人,就是一個風風火火的小弟了。它的基本結構、控制站都與ASENDRO EOD一樣,只是把上方的平行爪、立體攝像機,換成了寬角彩色和熱成像攝像機。它最大光學變焦18倍,可以工作在7~14微米波段,鏡頭視角達50°×35°。這套偵察設備還具備運動識別能力。它的行走裝置還可以快速更換爲四個輪胎,這樣更便于在野外執行任務。
ASENDRO模塊式機器人在行走方式、任務載荷方面能夠隨意進行調整,因此有很強的環境適應性,也大大方便了後勤保障。在反恐、排爆、偵察、救災行動中,它都能大展身手。更換不同的探測裝置、工作模塊、傳感器,它還可以完成地雷探測與排險等任務。甚至還可以安裝滑膛槍等武器裝備,作爲“戰士”參加警戒巡邏。
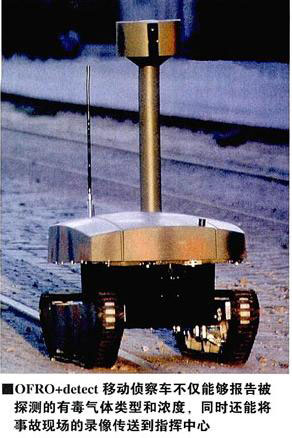
OFRO移動偵察車擁有多項功能,只要安裝不同的任務設備即可。值得一提的是,現在公司生産的OFRO+detect型機器人上配備了性能可靠且通過認證的氣體探測器,能夠探測出目前所有的軍事、工業用有毒氣體,比如硫代氰酸、神經毒氣、芥子氣等,數秒鍾內給出確切的分析結果。
OFRO能夠廣泛用于軍事基地、機場、臨時倉庫、油庫等場所,執行安防監控、化學武器探測等任務。由于它的控制軟件、界面與ASENDRO基本一樣。而且平臺本身也是模塊化的,因此在上面安裝武器、排爆等設備,同樣沒有問題。

全地形車在軍事領域,已經得到越來越廣泛的應用,作爲大型無人車的底盤也非常適合。CHRYSOR的底部車身采用高-密度聚乙烯材料,抽真空整體制成船形,耐酸堿,耐腐蝕,適用于-40℃+50℃之間。發動機功率31馬力(22.79千瓦),采用鏈條將動力從變速箱傳遞到八個車輪,結構尺寸很小。通過靜液傳動泵和馬達控制變速箱,它能實現差速轉向和原地轉向。CHRYSOR公路最大行駛速度達45千米/小時,水中達4千米/小x時,最大爬坡度大于37°,最大抗側翻角大于40°,可越過0.4米高的垂直障礙、1米寬的壕溝。油箱容積可達48升,在一般路面上可以持續行進工作12小時。
作爲無人車,最關鍵的還是它的腦、耳、眼,否則就無法自主或遙控行駛。CHRYSOR的車身中部有一臺高性能的車載人工智能電腦。負責處理全部數據,最終設計行車路線並調整車速,發出控制執行指令。其運算處理速度相當于幾臺高性能的商用電腦。
“耳朵”是指它先進的無線通信系統。它可使用WLAN無線局域網技術,或者基于GSM、GPRS、CDMA等公用移動通信網的無線通信技術。楊總和兩名工作人員帶了一臺筆記本電腦。控制一輛CHRYSOR來到車間外,開始爲我們演示。筆記本屏幕上,地圖、行駛路線,以及衆多攝像機傳回的圖像都顯示在一起,讓操作員對無人車的狀況一目了然。制定路線,下達指令後。CHRYSOR就開始“自由”行動了。GPS和慣導裝置安裝在車身中部,用來確定車的行進狀態和位置,保證車輛按照預定的路線行駛,防止偏離行駛路線。
但僅僅依靠GPS和慣導設備,還不能應付複雜的外部環境。遍布車身的各種傳感器就是CHRYSOR的“眼睛”。車體頭部扁平的喇叭口內是激光雷達,專門視察前方路況。一旦發現路面障礙物,無人車就會自動繞開。楊總介紹說,剛開始在廠區內試驗時,很多工人常常被這輛比轎車還大、還威風的家夥嚇一跳。但是大家很快發現,這家夥雖然對高坡、臺階如履平地,但其實並非“莽漢”,根本不會撞到人,現在連女工都不躲避它了。車身周圍按照一定角度還安裝了10部攝像頭,能將周圍狀況盡收眼裏。圖像數據傳回筆記本後,能自動拼接爲一幅連貫的全景圖像,顯示在屏幕上。
CHRYSOR在車體前部左側,還保留了一個座椅和簡單的駕駛設備。楊總介紹說,在這種大型無人車上,必要的人工駕駛功能還是必須保留的,不僅能在受損等特殊情況下備用,還能在出發、回收時減少制定路線的工作量。
CHRYSOR後部的貨艙可以安裝各種任務載荷,比如現在車上安裝的就是一套光電偵察系統。它有一個升降支撐臂(最高可升到2.5米),頂部安裝了高清晰攝像機、熱像儀,可360°旋轉,實時提供周圍環境的高清晰圖像。它還能安裝煙霧探測儀、聲響探測儀、震動探測儀、運動物體探測儀等多種偵察儀器。由于地面最大載重可達680千克,因此更換任務模塊後,CHRYSOR還可以作爲營救車、核生化偵察車、自主運輸車、通信中繼車或攻擊武器等使用。甚至可以在貨艙裏搭載幾輛小兄弟,比如前面介紹的ASENDRO,或者OFRO,到達目的地後卸下,組成機器人戰場任務小分隊。
無人裝備,科學發展
雖然和國外相比,我國在某些高技術研究、基礎技術領域還有差距,但在工業化生産、系統集成等方面,又具備一定的優勢。中國兵器工業集團正是利用這一點,大膽地與國外合作,快速提高了自己的技術水平。從MOSRO到CHRYSOR,四種大小不一的模塊化無人車,既有比較統一的核心控制系統,減少了生産使用難度,又能組合成十幾種型號。它們這一完整的配套系列,能完成從前線戰場偵察、運輸、救援、作戰、掃雷,到後勤保障、基地警戒、反恐排爆,等等各種任務,涵蓋了大多數軍事、准軍事領域。與單一地開發一兩種型號相比,這顯然具備更高的效費比。通過組建合資公司,華北光學儀器有限公司還順利地打開了産品市場,通過出口積累資金和生産經驗,一旦國內市場有需求,就能迅速提供成熟産品,快速提高我國、我軍的無人化裝備水平。
在楊總介紹時,記者注意到車間裏的一塊黑板上寫滿了名字,“偵察兵”、“敢探號”、“睿利”、“睿奇”、“探險神兵”、“奧福”……“這是不是你們給這幾款無人車起的名字?”記者好奇地問。“對,我們的職工正在集思廣益呢。也許你們的讀者朋友願意幫幫我們的忙?”“嗯,是應該起個好聽的中文名字,不然等到我們國內裝備這些聰明的小家夥時。還‘摸索’、‘奧弗洛’地叫,確實別扭。”“不錯,我們這些國防工業者,也和你們的讀者一樣,希望我們的國防日益強大。我們也會爲此加倍努力!”
http://mil.news.sina.com.cn/p/2008-08-07/1023515344.html




其主要特點是利用海水表面與水體一定深度的溫度差所産生的溫差能量作爲驅動能源。與電能驅動的水下監測平臺相比,溫差能驅動的水下監測平臺具有噪音小、續航時間長、成本低等優點。
http://mil.news.sina.com.cn/2005-12-27/1430340454.html

站反應堆堆芯上下部堆內構件吊出和回裝堆芯時進行水下監視觀察及對落入異物進行打撈,爲解決這一問題提供了最優解決方案。
http://mil.news.sina.com.cn/2006-01-12/1224343758.html
揭秘受困俄潛艇救星:天蠍遙控深潛器(組圖)2005-08-14 01:19:10
視頻:英國救援艇“天蠍”號救援立奇功2005-08-11 12:10:58
俄羅斯決定購買英國海軍“天蠍”深水裝置(圖)2005-08-09 16:47:06
俄潛艇海底受困75小時 超級天蠍救錦標(圖)2005-08-09 08:24:00
英國天蠍深海探測器斬斷鋼纜爲受困潛艇松綁2005-08-08 09:26:00
英國“天蠍”成功救起俄羅斯潛艇(組圖)2005-08-08 09:19:00
英天蠍咬斷最後纜繩 俄潛艇被困75小時獲救2005-08-08 08:32:00
http://mil.news.sina.com.cn/2005-12-27/1005340413.html
我們知道怎麼製作微型機器人,卻不知如何推動它,而今觸媒引擎可讓微型機器人由周圍取得燃料,並克服微觀世界裡奇特的物理現象,自由在水中遊走。
■這類機器將面對獨特的物理學原理。在極小的尺度中,液體和蜂蜜一樣黏稠,布朗運動則使所有物體不斷搖晃。
■化學家由活細胞的生物引擎取得靈感,研究如何透過觸媒反應為奈米機器人提供動力。
近年來,化學家開發出許多適用於微型機械的優異分子結構。舉例來說,美國萊斯大學的涂爾(James Tour)等人製作出分子尺度的汽車,以四個巴克球(形狀類似足球的碳分子)當做車輪,大小約為人體細胞的1/5000。但如果打開奈米汽車的引擎蓋,你會發現裡面沒有引擎。涂爾的奈米汽車目前唯一的動力來源是它與周圍分子隨機碰撞,也就是「布朗運動」。這就是分子機械目前最大的問題:我們知道怎麼製造,卻不知該怎麼推動它。
在等於或小於活細胞的尺度中,這項任務還得面對特殊挑戰。空氣和水對它們而言跟蜂蜜一樣黏稠,布朗運動則讓分子的行徑全無章法。在這些情況下,就算我們能夠把汽車引擎做成奈米尺度大小,恐怕也沒辦法讓它動起來。
然而,大自然中有許多奈米引擎的例子,觀察一下活細胞就知道了。細胞就是使用奈米引擎來改變形狀,在分裂時拉開染色體、建造蛋白質、吸收營養、從周圍來回運輸化學物質等。這類奈米引擎,以及肌肉收縮和細菌鞭毛螺旋狀運動的動力來源,都是相同的原理:將化學能(通常以三磷酸腺的形式儲存在細胞內)轉換成機械能,而這個反應必須藉助觸媒,也就是可促進三磷酸腺(ATP)分解的化合物。研究人員運用類似原理製造的人工奈米引擎,已獲得令人振奮的進展。
2004年,我們參與美國賓州州立大學的研究團隊,開發了一種簡單的奈米引擎,能運用觸媒將儲存在燃料分子內的能量轉換成運動。我們的構想取自2002年美國哈佛大學的伊斯馬基洛夫(Rustem Ismagilov)和懷特塞茲(George Whitesides)提出的觸媒引擎,它在尺寸上大了許多。哈佛大學的研究團隊發現,長數公分、尾部有白金條(鉑)做為觸媒的「小船」,可在過氧化氫(雙氧水)水溶液的表面上自動前進。鉑可促進雙氧水分解成氧與水,生成的氧氣氣泡產生反作用力,推動小船前進,就和噴氣由火箭尾部噴出,推動火箭前進一樣。
不過這個實驗的基礎假設是錯誤的,這在科學界經常發生。我們以為奈米棒尾端會釋放微小的氣泡,以反作用力推動它。但實際上的運作方式更加有趣,也讓奈米科技專家了解到,我們必須以相當不同的方式思考極小尺度的運動。
在巨觀尺度中,反作用力的概念確實有意義。我們游泳或划船時,手、腿或槳將水向後推,反作用力便會推動身體或船身前進,然後手即使停止划動,游泳者或船身仍可向前滑行,滑行的距離取決於黏滯力(或阻力)和慣性(物體對抗速度變化的能力):阻力與物體的直徑成正比,而慣性則與物體的質量成正比(也就是與物體直徑的三次方成正比)。對較小的物體而言,慣性的影響很快就可以忽略,因此只需考慮阻力。在微觀尺度中,滑行大約在一微秒內就會停止,滑行距離則少於1/100奈米。因此,對於水中的微米尺度物體而言,游泳就像在蜂蜜中艱難前進。奈米引擎不會記得推動它前進的力量(也就是沒有慣性),慣性推進方式(例如船身藉由氣泡提供的反作用力前進)在這裡也起不了作用。
奈米棒無法藉助滑行來運作,因此事實上是以持續施力來克服阻力。在鉑的一端,雙氧水分子分解成一個氧分子、兩個電子和兩個質子。在金的一端,電子和質子會和一個雙氧水分子結合,生成兩個水分子。這些反應會使棒子的一端多出一個質子、另一端則少一個質子,因此質子會沿著奈米棒的表面由鉑端移動到金端。
質子和水中其他正離子一樣,會吸引水分子帶負電的部份,在移動時帶動水分子,推動奈米棒朝反方向移動(請參見49頁〈仔細瞧瞧觸媒引擎〉),因為根據牛頓第三運動定律,作用力必有一個大小相等、方向相反的反作用力。
在我們的學生以及同校的的克瑞斯皮(Vincent H. Crespi)、維勒戈爾(Darrell Velegol)與凱奇馬克(Jeffrey Catchmark)協助之下,我們確立了上述的運作原則,並設計出其他數種觸媒奈米引擎。德州大學奧斯丁分校赫勒(Adam Heller)及亞利桑那州立大學王(Joseph Wang)等人曾經展示,混合不同的燃料(包括葡萄糖、氧或雙氧水與聯胺)可讓奈米引擎行進得比在單一燃料中更快。
我們開發的金屬奈米棒可在大量溶液中移動,由不受雙氧水影響的金屬奈米棒促使結構表面附近的液體流動,進而帶動液體中其他物體。我們已經證明了,帶有銀質花紋的黃金表面,也會產生這種液體帶送效果。
我們首先嘗試以磁場來解決操控問題。我們在奈米棒中嵌入可與磁場交互作用的鎳片,就像指南針一樣,鎳片南北極的軸線垂直於奈米棒的長軸。幾公釐外有一枚冰箱磁鐵,對奈米棒施加力矩,以克服布朗運動使奈米棒亂轉的力量。如此一來,剩下的就只有平行於奈米棒長軸的作用力,因此奈米棒可直線移動,並且可用磁場操控,很類似細菌自動對齊地球微弱磁場的行為。類似的引擎也可在微型的磁場迷宮中巡行,沿著磁力線左彎右拐。
2008年,克瑞斯皮和本文作者之一沈恩曾經展示以磁場操控的引擎可在液體中拖曳「貨櫃」,也就是體積為其10倍的塑膠球體。這類運輸引擎未來將有不少有趣的用途,例如將藥物投送到人體特定細胞,或在奈米尺度的組裝線上運送分子,以化學方式結合貨物與其他分子。
在外部操控奈米機器人可能相當有用,但是對某些用途而言,奈米機器人能自行移動可能比較重要。維勒戈爾和沈恩最近發現,我們的觸媒奈米棒能循化學「記號路徑」行進,這和細菌的行進方式相同。細菌通常以一連串直線方式前進,中間穿插有多次隨機轉向,但當直線行進正好朝化學梯度較高處行進時(例如越接近食物本身,食物的氣味越強),細菌直線行進的長度也會跟著增加。由於朝有利方向的行進距離比朝不利方向的行進距離長,因此結果是細菌會朝目標聚集,但其實沒有什麼因素直接操控它們,而是一種稱為「趨化性」的行進策略。

http://mil.news.sina.com.cn/2009-10-26/0757571401.html
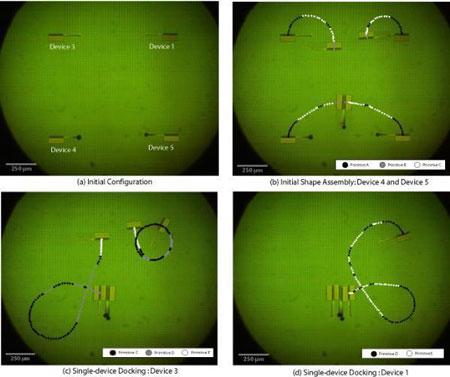
微型機器人在比針尖還小的舞臺上跳舞
http://tech.sina.com.cn/d/2008-06-09/09402245641.shtml
體內介入檢查與治療具有安全、微創等優點,並迅速成爲醫學工程領域的主流。人們研制出的微型消化道膠囊內窺鏡可以利用消化道蠕動進行整個區域檢查。但其行走緩慢,存在視覺盲區;錯過病變組織時,不能主動返程。
http://tech.sina.com.cn/d/2009-08-04/11413321442.shtml
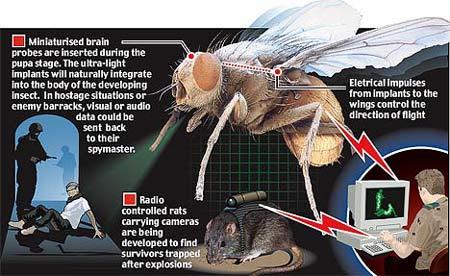
昆蟲和老鼠充當間諜示意圖
http://tech.sina.com.cn/d/2008-03-07/09282064005.shtml

研究者通過在昆蟲體內植入芯片,將活體昆蟲改造成半機器人。


喬治亞科技學院教授羅伯特米克森算得上這一行的票友。

現場有人大喊“天哪,快看”
今年9月,在華盛頓拉斐特廣場的反戰集會中,來自紐約的大學生瓦內薩?阿拉科恩碰上了這輩子從未見過的古怪玩意。她先是聽到人群中突然有人大喊:“天哪,快看!”阿拉科恩本能地一擡頭,驚呆了,心裏犯嘀咕,”這到底是什麽?”
據其回憶,當時盤旋于他們頭頂上的那些古怪玩意兒看起來既像蜻蜓,又如小型直升機。在場的一名律師伯納德?克蘭也證實看到過這類飛行物,他說:“我從沒見過這些東西,如果是蜻蜓,它們的個頭太大了。我在想,它們到底是機器還是活物?”
美國媒體稱,這類形似昆蟲的不速之客已非首次露面。最近,在華盛頓和紐約的許多政治集會上,很多示威者都見識了它們的架勢,有人懷疑它們是高科技監控工具,很可能是國土安全局釋放出來對集會遊行進行監視的;也有人認爲它們是大個兒的蜻蜓,只是看似人造機器。
揭秘國防部拒絕透露細節
猜測並非捕風捉影。盡管美國政府從未公開承認成功研制出機械昆蟲“間諜”,然而來自于美國政府內部的匿名消息證實,美政府正在進行此項研究,由其資助的研究小組致力于開發攜有電腦芯片的活體昆蟲。此類昆蟲可被施行遠程控制,從事無人能及的間諜活動。
據介紹,由美國國防部高級科研項目局(DARPA)資助的研究小組正進行機械昆蟲的研究,它並非將機器人制成昆蟲形狀,而是通過在昆蟲體內植入芯片,將活體昆蟲改造成半機器人。研究人員計劃將電腦蕊片值入蛾的蛹體內,待其發育成健康的成體飛蛾後,昆蟲的部分神經與電腦蕊片自然結合,已達到被軍事人員控制飛行的目的。
DARPA項目負責人阿米特?拉爾在日前的一次研討會中描述說,在魔幻電影《魔戒》中,大魔法師甘道夫用一只飛蛾召喚來空中支援,“這一科幻場景正在變成現實”。DARPA未公開更多細節,並拒絕了美國媒體記者提出的參觀實驗室的要求。
一旦開發成功,機械昆蟲將在各個領域派上大用場。除了充當間諜工具,機械昆蟲可以跟蹤疑犯,可以引導導彈精確打擊目標,還可以在倒塌的廢墟中尋找生還者。機械昆蟲的研發工作仍然面臨很多高難度的技術障礙,由此大多數專家認爲機械昆蟲的研發技術還未走向成熟。
風險業余愛好者引發挑戰
美國媒體稱,進行機械昆蟲研究的並非美國國防部一家,不過,美國國土安全部、勤務局拒絕就此解答。只有美國聯邦調查局(FBI)提供一份聲明,否認類似科研項目的存在,“我們沒有這類東西”。
美國官方公布的數據顯示,過去一年時間內,美國微型飛行器已登記在冊的飛行時間就達16萬小時,這比2003年增加了4倍。美國軍方最近就此特意警告稱,如果不盡快出臺有關微型飛行器的飛行規則,大量增加的無人飛行器會使軍方空域混亂不堪,甚至蘊含潛在危險。
有分析人士稱,這個領域的門檻並非高不可越,造成了大量業余愛好者進入其中,給官方的管理工作帶來挑戰。
曆史蜻蜓飛機上世紀問世
早在20世紀70年代,美國中央情報局(CIA)就曾開發出簡單的蜻蜓式間諜飛機。伴隨著軍事研發水平的進步,即使對此持懷疑態度的人,也相信美政府部門有能力秘密研發更爲先進的機械昆蟲“間諜”。據其發言人透露,CIA研發辦公室在30年前就開發了一款名爲“昆蟲直升機”的飛行器,形如蜻蜓,它有一臺微型汽油發動機來驅動兩翼。雖然“昆蟲直升機”有能力升空,但是一遇大風就無法飛行,甚至有被大風吞噬的風險。CIA發言人稱,至于目前研發的新産品,只能是“無可奉告”。
二戰結束後,美國軍方就開始使用微型飛行器。而在過去十年,無論是數量還是技術水平,微型飛行器的“含金量”已大幅提升。美國國防部提供的文件顯示,迄今爲止,美國已投入使用的微型飛行器有100多個不同品種,大的如同小型飛機,小的好似飛鳥。
體積縮小遇能量障礙
從機械鳥到機械昆蟲,並非體積縮小那麽簡單,它需要跨越的是巨大的技術障礙,能量供給就是現實難題。對此,美國加利福尼亞大學機械專家羅納德?弗林表示:“並不是將傳統機器人或飛行器尺寸縮小就可以搞定,因爲涉及的昆蟲仿生學技術是一個重大的工程挑戰。”
直到最近數年,專家們才能完整解釋昆蟲飛行的原理。康乃爾大學研究人員今年9月發布了一項成果,即解釋蜻蜓如何通過調整兩翼,從而在飛行中節省能量。這一研究對機械昆蟲的開發有著重大意義,因爲兩翼的設計是對于能量支持的考量。
小家夥易遭飛鳥暗算
加利福尼亞技術學院的專家們已成功研發出能夠自由飛翔,如手掌大小的微型飛行器,不過它的兩翼如同船帆,和昆蟲有很大區別。美國哈佛大學的一個專家小組在今年7月研發出真正類似昆蟲飛行的仿生飛行器,其兩翼每秒能扇動120次。
即使所有技術障礙被一一克服,但是機械昆蟲間諜的飛行器還存在其他風險。美國加利福尼亞大學機械專家羅納德?弗林指出,它們很容易被飛鳥吃掉,也可能被蜘蛛網纏住,“就算你給它們裝上奔騰芯片,當一只鳥高速沖過來時,它也只能束手就擒。”(謝來)
公民隱私權易被侵犯
隨著政府部門加大研發機械昆蟲的力度,以及業余人士越來越多地投身其中,公民隱私權就存在被侵犯的風險。對此,美國民權組織“公民正義夥伴”負責人馬拉?哈立拉德表示,她已根據《信息自由法案》向數家聯邦機構表達了希望了解真相的要求。她說,若證實政府機構使用微型偵察飛行器監視政治活動,“這將是嚴重違反人權的行爲”。
機械專家弗林對此認爲,這一擔憂有些“多余”。他說:“我不希望人們患上妄想症,如今拍照手機隨處可見,這和機械昆蟲並無多大區別。”言下之意是,即使無需機械昆蟲,用于窺探和監視的方式已足夠多
比如,上個世紀70年代,科學技術部門開發出一種微型竊聽器。中情局的科學家們最先考慮設計一只機械大黃蜂來“運送”竊聽器。不過,他們很快就發現,真正的大黃蜂飛行時飄忽不定,這一思路只好作罷。隨後,又有人提議制造一只機械蜻蜓。
http://news.sina.com.cn/s/2003-10-30/15331024988s.shtml
動物在戰場上的作用,戰爭史上對軍犬、軍馬、軍鴿等記載較多,而另一些“戰場勇士”則鮮爲人知。在未來戰爭中,這些動物仍將扮演較爲重要的角色。
蒼蠅——間諜好手
http://tech.sina.com.cn/d/2005-09-27/0753729651.shtml
在戰爭中,知己知彼,方能百戰不殆。如何獲取更多有價值的情報,成爲許多軍事指揮官苦苦思索的一個問題。最近,英國科學家發現,模仿昆蟲的飛行原理,將成爲下一代間諜飛行器的研究方向。
http://news.sina.com.cn/w/2005-01-12/17135520257.shtml
新華社報導,大陸哈爾濱工業大學(哈工大)最近開發出一種可以在水面上行走的小型機器人,在軍事偵察、水汙染監測等領域,擁有廣泛應用的前景。
「水上漂」機器人的靈感來自身體輕盈、漂在水面上活動的水黽。負責這項研究的教授潘欽敏指出,他們用水黽腳部的「羽毛狀」微奈米結構,研發一種「超級浮力材料」,這種新材料的水上載重能力驚人。
哈工大的科學家利用已經獲得的新材料製造出小型水上機器人,由十條支撐腿和兩條螺旋狀驅動腿組成,動力由小型馬達提供。
潘欽敏說,機器人相當於約三百九十隻水黽的重量,但能輕鬆站在水面。研究成果已刊登在美國的專業期刊上。
新浪科技訊 北京時間:2007-7月12日消息,據物理學家組織網報道,最近,美國卡內基?梅隆大學的兩位研究人員——機械工程學博士生宋演武(Yun Seong Song)和機械工程學助理教授梅丁?西蒂——研制出世界上第一個能夠模仿水黽“水上漂”功夫的機器人。這款可以在水上行走的機器人無論是外觀還是設計都與水黽類似:它不會破壞水面張力,而且擁有高度的可操作性和靈活性。
在水面上演“淩波微步”的水黽可能一輩子也不會在陸地上留下它們的足迹,實際上,它們也並不是什麽遊泳健將。大約100萬年前,這種昆蟲便在最大限度上利用水面張力,平衡它們只有0.01克中的身體。無論是在湖泊、池塘還是海洋,它們可謂真正做到了“任我行”三個字。
與其它可在水面漂浮的
機器人有所不同的是,宋演武和西蒂研制的小型機器人重量較輕,而且擁有長“腿”,因此能夠充分利用水面張力,進而保持飄浮狀態。相比之下,水上機器人中的“大塊頭”必須依靠浮力,而這種依靠還要取決于它們的體積。根據兩位研究員的預測,這款小型機器人可能被用于環境監控,方式是通過無線通信。此外,它們也可以被用于教育和娛樂目的。
西蒂說:“機器水黽——我們稱之爲‘表面張力機器昆蟲動力學探測器’——能夠在只有3到4米深的淺水上行走。它們的功率和敏捷度(速度和靈活性)都要大大超過相關的小型水上機器人,原因在于:相對于任何依靠浮力的機器人來說,機器水黽的‘腿’受到的阻力更小。”而正如西蒂所指出的那樣,如果機器水黽成爲一個以米計算的“大塊頭”,這種優勢必然不複存在——表面張力難于讓“大塊頭”立于水面之上。
通過制造模型和進行相關計算,兩位研究員最終打造出一款最理想的機器水黽。它擁有不溶于水的線“腿”——外部塗上一層特氟綸(防水塑料)——每一條長5厘米。共有12條“腿”被附在只有1克重的身體上。在實驗過程中,這款機器人的有效載荷最高時可達到9.3克。其避免破壞水面張力的關鍵之處在于:維持一個水-氣界面,更多地保持水平狀態而不是垂直狀態。
水黽創造了一種“雙槳式劃水”的運動方式:專門負責劃水的腿像漿一樣劃動,從而推動身體在水面上前後運動。機器水黽也采取了同樣的方式:3臺安裝在腿上的“T”型壓電馬達可提供垂直和水平方向的運動力,從而産生“雙槳式劃水”動作,帶動身體在水面上移動。
由于壓電馬達只能提供小角度的偏移,因此需要一臺放大器創造大的劃水動作。爲了實現這一點,兩位研究員利用了一個共振頻率——擁有可産生理想“雙槳式劃水”動作的振動模式——驅動壓電馬達。水黽的移動速度最高時可達到每秒1.5米,機器水黽自然無法與之相比,但它的前進速度也可達到每秒3厘米,而且也可以轉向、旋轉和後退。
波濤洶湧的水面可能將機器水黽至于險地,但西蒂認爲,只要提高托舉能力和水封性,這款新機器人便能夠抵擋住海浪和暴風雨。
http://www.bioguider.com/neurosci/AI/32789.html
另參本館: 生化武器 《昆蟲記》 FCS未來戰鬥系統 未來士兵 中國無人機 無人機 戰鬥機器人
第15屆珠海航展相關新聞
海軍前艦長呂禮詩航展哽咽提到想讓台灣觀眾知道「我們中國有多強」,引發國防部批評。對此,前立委郭正亮14日表示「呂沒必要道歉,如果要就法律來說,是規定將領,但他是少校,他們主要是要恫嚇軍人」,引發討論。(回應:蔡說過不必為任何認同道歉,還說甚麼言論自由? PLA軍事裝備讓綠營集體崩潰!) 外媒報導我將在川普上任後提出4800億元的軍購清單,國防部長顧立雄13日表示沒有這樣的清單。對此,郭表示「我不認為美國會賣,F-35、神盾軍艦、E-2D空中預警機,台灣跟中國大陸太近,美國認為數據會被搜集」。街訪一面倒,認為「我覺得5000億不值得,賣給我們的都是淘汰的」。
自由時報引述前海軍顧問郭璽:海鯤號明年3月絕對不會海測 2024/11/09國防部長顧立雄稱明年3,4月海測(SAT)。
解放軍潛艦匿蹤技術 小步快走: 039C隱形潛艦搭載鷹擊-18飛彈現身東海。039D服役東海艦隊,擁有獨特的隱形潛望塔,可發射程達1000-1500公里的鷹擊-21高超音速反艦飛彈。新型核潛艇093B採用有軸泵推,搭載24具巡航導彈垂發單元。
隱形戰鬥無人艇首曝光: 中國船舶500噸級無人作戰艦艇「虎鯨號」身長58公尺,寬23公尺,最高航速大於40節,續航力超過4000海浬。廣船三體船長60-70米/300-500噸的無人作戰艦。外觀科幻、高隱形性,配四面陣列雷達另有電子戰/電子干擾設施、垂直發射導彈系統,尾部甲板用於無人機起降。能實現多艇協同作戰(或稱狼群戰術),可高效獵殺海上的艦船,提升反艦作戰效率。
殲35 A隱形戰機航展飛行 國產渦扇19轟鳴超震撼:殲-35機腹隱蔽彈倉與殲-20相當,4枚固定彈翼的霹靂-15(PL-15)遠端空空導彈(200-300公里)或者6枚彈翼可折疊的霹靂-15, 機側彈倉2枚近距格鬥導彈。
「全域防空偵測裝備」亮相:跨時代反隱身雷達YLC-2E與依賴低頻段米波雷達的YLC-8E傳統反隱身雷達不同,透過能量與智慧演算法實現強大的反隱身能力。
一種新型汽車兩棲機器人及其工作方法
一種新型兩棲機器人,其特徵包括上、下兩部分,其中上半部包括半圓球殼和圓盤,下半部至少包括三組驅動裝置和攝影機;其工作方法包括:通電、感測器判斷、選擇運動方式、運動狀態改變;其相應性滿足:水陸兩種環境中運動;同時能夠完成在陸地上多種運動;機器人靈活性好;噪音低;起始強;體積小易操作。
https://www.youtube.com/watch?v=EpxNq4Pfi2k
搶佔新一輪科技革命與產業變革新賽道 特種機器人 2024-07-22 中國青年報
在一個礦井巷道中飛滾而來的不是巨石和“滾地雷”,而是球形機器人;用手輕輕一拋就起飛的不是紙飛機,而是機器人;甚至連兒童動畫片中會飛的“狗狗”,爬水管、電線的“蜘蛛人”,都變成了生產一線的機器人。
前不久,中青報•中青網記者在採訪浙江省的一些科研院所和企業時發現,不少特種機器人從科研論文裡“走”了出來,走向了市場貨櫃,上天入地下海,“大顯神通」。而在這背後,是產學研開展全面合作,不走「閉門造車」老路子。
特種機器人快速崛起
在浙江省衢州市110千伏天寧變電站,有一個身高約2公尺的智慧機器人。
浙江大學湖州研究院工程師王超說,他們正在測試一款會飛的“機器狗”,分別在其胸腔內嵌二涵道,或在四條腿上內嵌四涵道,除具備快速行走、空翻、跳躍、攻擊能力外,還能離地飛行3分鐘,跨越河流與各種障礙物。
更重要的是,劉維維認為,特種機器人研發,引進並應用了大量新材料和製造技術,往往需要生物學、物理學、化學、材料科學、電腦科學等多個學科的交叉合作,促進機器人產業升級換代,推動機器人學、人工智慧、仿生學等科技前線的學術研究。
尤其是現在,科學研究人員還要持續追蹤並引進人工智慧、物聯網、大數據等尖端技術,提升「變型」機器人的智慧化和互聯化程度。
2023年中國工業機器人佔全球51%,比美、日、韓、德安裝總量3倍還多 2024-09-25
國際機器人聯合會(IFR)《2024世界機器人報告》顯示,2023年工業機器人銷售量下降至54.13萬台,年減 2.1%,但安裝數量連續第三年超過了50萬台;2023年服務機器人市場持續成長,全球專業服務機器人(含自主移動機器人,AMR)的安裝量為20.5萬台,成長30%。醫療機器人的安裝量為6200台,成長36%。消費者服務機器人的安裝量為410萬台,成長了1%。
海軍:殲-15T(電磁彈射)和殲-15D (電戰)艦載機做了起飛著艦改進
中國貨運太空梭「昊龍」 「白帝」太空戰機概念模型亮相中國航展
首次展出!紅旗-19地對空飛彈,每車配6枚「冷」發射,並非紅旗-9的4枚垂直發射方式(為確保殺傷半徑,高爆破片戰鬥部達100公斤),而是一種近乎垂直的大傾斜角發射方式(彈道飛彈進攻方向比較確定,動能攔截戰鬥部只有23公斤,採用碳纖維複合材料纏繞式殼體,使用高密度、高燃速的N15B高性能推進劑等,降低重量),可攔傳統彈道飛彈,對抗滑翔機動突防高超飛彈。
無人機亮相珠海:九天最大起飛10噸(美國死神6噸),中國彩虹-6/9有7.8/6.5噸,彩虹7隱身(翼展27.3米,升限1.6萬米,最大航程1萬公里),可攜帶大型巡航/超音速導彈和反艦導彈,有了彩虹-7,轟-20似乎不那麼重要了。
飛龍300A(ASN-301)反輻射無人機系統,續航4小時,攻擊和長時壓制防空雷達系統。飛龍60A型巡飛彈與火箭砲結合,大幅提升偵察引導、區域封鎖、重點目標獵殺。
回應俄烏戰 VT-4 A1主戰坦採用了多重複合式防禦辦法,首先是多頻譜干擾電波中斷無人機的訊號。不行,就靠主動防護系統APS直接擊落。
DS1電戰系統可對飛彈、自殺無人機、遙控炸彈等威脅。
一場烏克蘭戰爭讓俄式武器原形畢露,俄爹的武器都賣不出去了,哪輪得到土共。俄烏戰場上摔掉的F-16、被擊毀的M1A1 、攔不住毛子超高音速飛彈的愛國者系統、全數脫靶的海馬斯火箭、打不準的美製155榴彈砲、貴桑桑被嫌難用的美製無人機、美製防彈板……等等,就是這些美式武器糗態百出,才讓老共武器有出頭天的機會,哈哈哈……
鈦合金都用來做迫擊砲了,中國為啥這麼豪橫? 鈦合金使整砲僅8.5公斤,傳統22.4公斤的93式60mm迫擊砲,座鈑就重達7.3kg。鈦合金具有比強度高、耐腐蝕、耐高溫和抗疲勞等特點,重量只是鋼的60%,但是加工比鋼複雜得多。全球鈦礦約7.49億噸,中國佔30.7%,世界第一。
2002年開發的02式14.5毫米高射機槍,採用鈦合金材料,整槍只有73公斤,比75式14.5減重46%,是全球唯一的鈦合金大口徑機槍。
中國對標美製M777型榴彈砲的AH-4型榴彈砲,鈦合金比例10%,透過綜合減重設計,砲重4.2噸,只比全用鈦合金的M777重了300公斤。
中國甚至在2019年「奢侈」地為邊境部隊配發了19式鈦水壺。