2011-5-16‧天文攝影用「無精度赤道儀」‧抵銷周期誤差之赤道儀齒輪配置示意圖
2011-5-16‧天文攝影用「無精度赤道儀」‧抵銷周期誤差之赤道儀齒輪配置示意圖
‧筆者追隨聖人的腳步,從小就很賤所以會做許多卑鄙的事情(論語:「吾少也賤故多能鄙事」)。
‧在 Google 和 Yahoo! 搜尋「

原始影片:http://www.youtube.com/watch?v=S3XAeMCeZr0&feature=fvwrel&hd=1
原始影片很精緻流暢而快速故需慢速分格動畫才能看清
赤道儀的極軸蝸輪被蝸桿轉動時
因為蝸輪被蝸桿下切側推的碰觸位置隨時間而異
即使蝸桿以均速轉動
蝸輪也是每齒之間忽快忽慢的前進
昨天有說過要提供能夠消除第一、二級周期誤差的赤道儀圖解,因為這種細微控制已經不易以步進馬達進行數位跳格控制運作,所以可以齒輪進行類比補償,下圖就是筆者的想法,筆者的想法是以驅動齒輪組和減速齒輪組都增加齒輪來補償(抵銷)周期誤差,這樣是一定可以讓周期誤差消失,也就是讓赤道儀精度測量正弦圖趨近為一條水平直線。
這樣的赤道儀,筆者稱之為『無精度赤道儀』,因為它不需要標示追蹤精度,因為不會有追蹤偏差(就算有也可用極軸管理技術搓掉,連筆者也無力察覺)。 雖然這只是一個人想出來的笨方法,但是一定有效解決周期誤差。
這種低層次的算不上是研究,只是基於周期誤差的知識作出簡單應用思考而已,連這種事情都要想很久的話,筆者就別混了(不過從構想到畫圖,還是花了半小時)。

- 上圖只是示意說明,各天文廠都可以自由思考做出更好的設計(當然照做也一樣是自由FREE可以的,免需知會筆者的),這樣的赤道儀可能不宜高速GOTO以避免磨耗精度。
CNC ウォーム研削盤
(下面有中文版‧中日同步放映對照可做專業日文學習)
數值控制蝸(螺)桿磨床(中文版)
一定有會嫌不會用的人主張這樣的設計在逆轉時會有多重回差遊隙,但是追蹤精度已經遠低於大氣擾動的情況下,在天体追蹤攝影期間是不需要逆轉的,連減速的需要都蕩然無存了,當然這個前提是要以單星雙軸法對準極軸(沒有別的方法會準請放心),這樣連防禦性導星技術都無用武之地了,是很完美的模式了,可以滿足天文攝影的高度要求,和坊間網站與雜誌投稿的星景攝影不一樣就是不一樣。
有錢有嫌又有用不會用的人很多
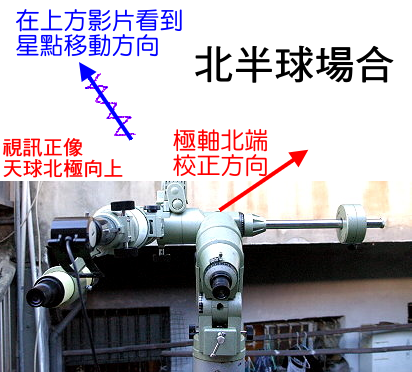
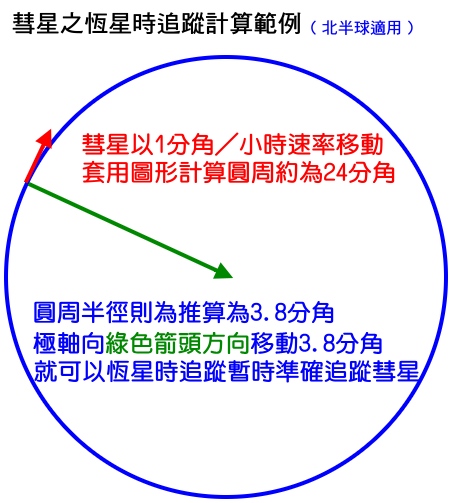
當然還會有人主張拍攝彗星需要減速追蹤,其實聰明作法是要移動極軸位置作恆星時速追蹤才對,這樣的追蹤才會穩定優雅,不要老只想要用赤經赤緯追著彗星跑,只需敲挪一下極軸以恆星時追蹤,自然就會與彗星同步的,可參考 http://mypaper.pchome.com.tw/8cm/post/1321850229。
真正需要操作的關鍵是極軸,而不是赤經赤緯,需要用電腦控制精密移動的是極軸的方位仰角,而不是赤經赤緯,筆者建請學好極軸管理技術,望遠鏡標單要設計進來的的就是這個。
8cm之都會星空輕快日記繪製
這樣的設計適合小型攝星赤道儀,準精度級赤道儀製造廠就可以實施發揮效果,堂堂正正的超越傳統高精度級。因為周期誤差可以消除的話,就可以揚棄高齒數式敷衍設計的大型赤道儀,也就是說144齒就一定足夠,再加上去除極望加強剛性(單星雙軸校正極軸可免用極望),很小的赤道儀也超越傳統大型重機表現,又可以發揮輕快移動優勢,以高度集中曝光快速拍到暗星,以輕準機材取得致勝機會,因為追蹤攝影的品質關鍵不在望遠鏡口徑而是追蹤精度,這是由於長時間曝光時,望遠鏡的分解能遠低於大氣擾動,大氣擾動又遠低於周期誤差,周期誤差又低於極軸偏差引發導星偏差。
馬達的驅動扭力是需要增加一些,但是輕機就有超重機精度,所以採用中型機馬達就綽綽有餘馬力過剩了。

997)
筆者怕笨,所以保持一個人做事
簡單來說,這幾年來除了大氣擾動之外,在不與人討論的情況下,筆者已經解決所有赤道儀不準問題,以準精度赤道儀廠的模具水準,必可輕易達成目標。要減低大氣擾動,就要前往無風高山,筆者就只能幫到這裡。
有這架準赤道儀的模具精度就充分足夠用來實現『無精度赤道儀』
原因在於它可以用單星雙軸法對準極軸做出以下動畫
這就是模具100%合格的証明
目視向赤道儀就不需要這麼複雜的設計,輕巧才好玩的,筆者不做天文攝影,所以不需要這種攝星赤道儀,也懶得幫忙參與測試。
有些重點還是要持續強調的,首先是選擇導星的問題,恆星的導星不需要選擇視野內的恆星,像拍M42星雲時,選擇天狼星或北極星都一樣可以當作導星的,因為單一極軸偏差事件對全天恆星的導星偏差是一樣的(也就是說全天每一個恆星的導星偏移偏移的方位角度都會是同步的,不能說100%完全沒差,但在一般攝影期間偏差量會遠低於大氣擾動),所以沒有找不到導星的問題,真正的問題是不知道全天隨便找一個超亮恆星都可以當作導星,這一點確實違背坊間常識,手工導星或光電導星做一次就知道,極軸誤差越小越有效(把北極星導入極望視野中央附近就夠了,不必精確準位,數學上的效果就足以充分成立了)。
在相同的極軸偏差場合,無論是用天狼星或北極星做為導星,兩者都會同時呈現幾乎100%相同的情形,連筆者也無法分辨兩者差異,所以完全沒必要以視野內的暗星做為導星,也不存在有找不到導星的問題。依據下表粗估上圖的極軸偏差只有0.008度角(28.8秒角‧請勿奢望強求極望每次做到這種失格水準),修正方向如下圖。
如果可以隨意找亮星來導星,這樣導星鏡組合的選擇性就寬廣許多,「窺管」就是下一次瞄準配件進化,卻也會是一次逆進化。 另外一個討論,就是很多導星不佳是技術不良所致,但是卻常把責任歸咎於望遠鏡剛性不足有形變,其實曝光也就那幾分鐘而已,現代數位攝影又沒有什麼相互則不軌(又稱互換則不依)之類的問題,不如擔心風吹要好好固定約束避免晃動比較實在,大家擔心剛性問題結果望遠鏡越買越重,其實導星失敗的責任分配比重如何分配,應該還有檢討空間,當然用光電導星來敷衍也是速效方法,有了光電導星就可以把很多問題打包起來拋諸腦後。 對於官派學閥的巨大望遠鏡而言,考量望遠鏡重力形變而做離軸導星離軸導星是有必要,業餘小鏡沒有這個顧慮,也不該把導星不良責任隨便誣賴到形變上頭,因為看相片就可以檢討出來,依據望遠鏡結構來看重力形變會有特別的方向性,誤判機率低於30%。不同的導星不良因素都有特徵可循,看相片可以稍微猜測出來各種因素比重 ,建議先做到下面這樣自動追蹤再追究有無形變。 做到這個程度導星超簡單‧赤道儀極軸偏差是難以估計的微小 (這是筆者第一次用單星雙軸法校正‧因為是初體驗故花了兩小時)
有些評估是說光電導星效果有好有壞,其實這也是有可能改善的,善於運用極軸管理技術,可以讓光電導星的工作負擔降低很多,各方因素各退一步,光電感知和運作介入效率就會提升,在北半球只要極軸微微升舉就可以,升舉的角度計算可以參考以下連結,大家只要照自己的赤道儀精度做比例增減就可以,也就是精度6.5秒角的赤道儀要升舉0.2度。 看到這裡會覺得一頭霧水是正常的,以上大多屬於在台灣本地多年來逐漸發展的技術,台灣以外文獻找不到是正確無誤,二十幾年來在台灣大約只有幾人理解,早先在本格推理全有見解沒有隱藏,逐篇參考就可以慢慢瞭解。
2010-04-26‧極軸管理理論最速實戰‧赤道儀卡卡篇 ※精度6.5秒角的意思是周期誤差全幅13秒角,高級赤道儀要加計大氣擾動全幅3秒角,例如精度4秒角的要以5.5秒角計算(周期誤差全幅11秒)。 |