2009-03-09 00:28:478cm
赤道儀周期誤差的webcam攝影動畫
前兩天提到了自動對極軸的機制,如果對好極軸再逆修正極軸望遠鏡的話(也就是極軸準確不動,再紀錄當時北極星在極望視野的相對位置,並不是拆下極望調整標板位置的意思),即使極軸望遠鏡中心沒有和赤道儀極軸同軸,也不影響準確度的,數學的結論就是這樣,實際運作的結果也會是如此。
極軸誤差的非機械性因素很多,排除這些非機械因素的干擾,赤道儀的精度就可以完全發揮。赤道儀的操作方式也會造成極軸的偏移,筆者因為望遠鏡視野受到侷限,導致赤道儀只在特定範圍內來回操作,加上裝卸望遠鏡的操作形成固定方向震動,造成赤道儀極軸會有固定方向/速度的偏移。
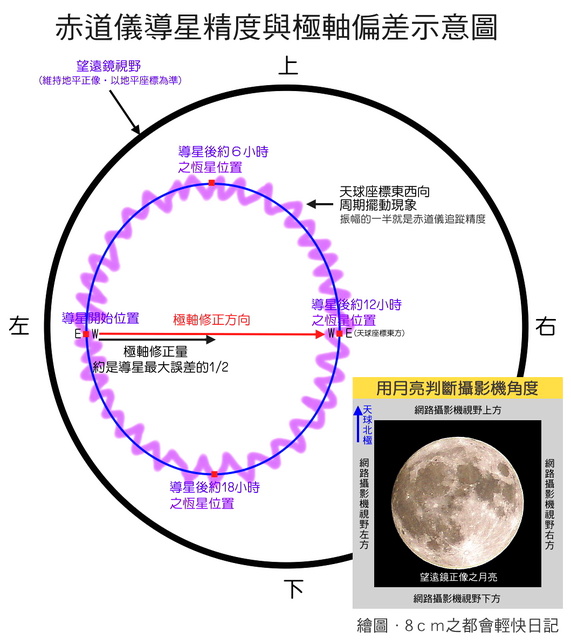
以下就是呈現周期誤差的webcam攝影動畫,在自動追蹤的情況下,極軸修正完成時就會看到以下畫面(看不到動畫的朋友請開啟瀏覽器的『播放網頁動畫』)。
(動畫之天球座標水平符合左右方向,左西右東,筆者的研究相片都保持這樣的原則)
內行的朋友一定想到了,如果掌握周期擺動的韻律,就可以在周期擺動變化方向的前後時間進行三~五分鐘的攝影,在沒有任何輔助修正的情況下,以筆者實測精度PE±6.5秒角的赤道儀來說,這樣的導星誤差可以侷限在4秒角以內(可惜平地大氣擾動較大,誤差數值還會小幅增加)。如果由筆者參與研製高精度赤道儀的話,馬達驅動赤經齒輪的轉軸會做標記(或是用感應器監測,不過筆者不喜歡自動控制,因為牽連的線材會很多,不如人工監測比較單純),這樣可以掌握周期擺動的韻律。這樣的赤道儀在沒有輔助修正的『可預先計算之干擾』下,適合進行高精度觀測和攝影。
順帶補充一句,如果高精度攝影的特定天體移動速度和周期誤差比較起來相對明顯的話,就要考慮將極軸偏離正確位置,有助於讓赤道儀能與該天體短暫處於同步狀態。極軸的良好管理可以讓高精度攝影的環境更加優越。如果要依賴自動校準裝置協助導星,最好運作程式能做『下次修正時間』之類的的倒數警示,甚至進化到針對周期誤差修正(PEC)的倒數警示,搭配攝影/觀測的指定精度範圍,這樣就可以研判赤道儀的最適攝影時機。
如果能把極軸校正到準確,依據筆者觀察現有製造機材,建議高精度攝影者也可以考慮使用內建周期誤差修正功能(PEC)的赤道儀(筆者沒用過這類機材,有那些品牌型號也不清楚,只知道應該都是美國廠牌製品),不過這大概只能應付恆星,也算是非常有用的了。
以筆者的認知來說,極軸望遠鏡的修正在筆者來看實在算是多餘的,只要在對準極軸以後,再紀錄北極星在極軸望遠鏡視野內的正確位置就完美OK了。筆者覺得現有極軸望遠鏡視野裡的蝕刻設計還是有待改進,應該在北極星附近做細微的井字型劃格,這樣有能力不靠極望對準極軸的移動觀測者就能順利紀錄北極星在極望內的精確位置。如果極軸誤差是一度,導星後約12小時會達到最大誤差接近二度,幾乎不因恆星座標不同而異(也就是說用在北極星和織女星都是差不多的),外國文獻應該找不到,因為這個不等式是早年在台灣本地證明出來的。用高二數學的程度就可以做到,就算是數學考試保持不及格的同學,只要思考模型正確,也可以靠一本數學公式手冊完成推算,不會有什麼障礙的。
數學理論都是舊有的,不過實驗影片都是用8cm長焦望遠鏡做的,如果不用長焦望遠鏡還真的不好做實驗,如果口徑太大操作太累就懶得經常做實驗了。8cm普通消色差長焦折射鏡在台北平地可以目視近10等星,在輕巧和機能之間可以達到最大的平衡。
想要找天文相關課題作數學練習,人造衛星的掠空角度分析是好題目,目的是提供鑑別人造衛星與流星參考指標之一,這項課題有實用性但無開創性,不適合當作科展得獎之用,不過當作高中數學練習真的很好用。
元宵做半影月蝕視訊服務時,看到了掠過月面的物體,先前認為不是人造衛星,後來經過一些計算,發現真的是人造衛星。要拍到掠過月面的人造衛星,基於人造衛星掠過月面最大直徑略超過一秒,最好是每隔一秒鐘以內拍攝一張全月面相片,比較有機會捕捉到人造衛星通過月面的相片。實際看來,流星的速度比人造衛星快得多了。